目前市场上的前扫声纳产品主要是Echopilot 3D FLS以及Navico旗下的Simrad ForwardScan。但是Garmin公司的Panoptix是目前技术最为先进的前扫声纳产品,前向扫描宽度高达60°广角。我们知道,前年Garmin公司收购了世界知名的前扫声纳设计制造商Interphase公司,所以我们可以预见Garmin公司的最新前扫声纳技术将会在目前行业水平的基础上有了巨大的性能提升与改进,显然是超越目前Echopilot 3D FLS和Simrad ForwardScan的新一代技术之产品。
Garmin公司将其此新技术产品功能称之为LiveVü Forward 或者 RealVü 3D Forward。通过Panoptix前向声纳传感器可以为Garmin多功能导航仪MFD提供全方位的水下实时结构动态状况,可以显示船下前方、后方、两舷以及垂直方向的水下实时图像包括船前方游动的鱼群。更为突出的是即使船舶是处于静止状态依然可以探测,此为业界同类产品尚未具有之功能。
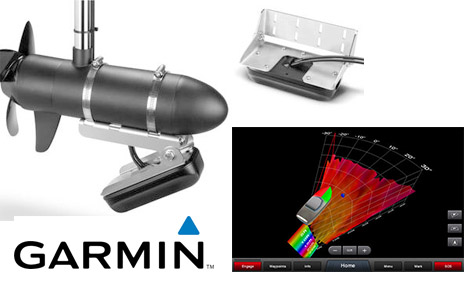
Panoptix前向声纳传感器是一个多波束声纳传感器,采用相位矩阵声纳扫描技术,特别适合近海、内陆江湖使用。而此技术过往只有应用在远洋商业捕鱼领域。PS31 Panoptix和PS30 Panoptix传感器均内置了先进的 Attitude Heading Reference System (AHRS)姿态航向参考系统,从而可以稳定地调整声纳波束并对船舶晃动进行补偿修正获得最为精准的探测效果。
基于Garmin公司丰富的航空GPS行业经验,在全新的Panoptix前向扫描声纳系统中引入了姿态航向参考系统(AHRS)。
姿态航向参考系统(AHRS)是由传感器在三个轴向上感应提供的航行姿态信息,其包括航向,俯仰和偏航数据,旨在取代传统的机械陀螺飞行仪器,并提供卓越的可靠性和准确性。
AHRS由任一固态或微机电系统(MEMS)陀螺仪、加速计和磁强计在所有三个轴向上。惯性测量单元(IMU)和AHRS之间的主要区别是在一个AHRS提供解决姿态航向解决方案与一个IMU传感器数据传送到该修正装置的一个附加设备上并加入一个本版处理系统的解决方案。除了确定姿态的AHRS之外,其也可作为一个惯性导航系统的一部分。
非线性估算诸如扩展卡尔曼滤波器的一种形式,通常用于计算来自这些多个源溶液中。
AHRS已经证明是高度可靠的、并在商业和商务飞机的广泛使用的飞行姿态监测系统。 AHRS通常集成在电子飞行仪表系统(EFIS),其是所谓的玻璃座舱的中央部分,以形成主飞行显示。 AHRS可以和大气数据计算机结合,形成一个“空气数据、姿态航向基准系统”(ADAHRS)提供额外的信息,例如飞行空速、海拔高度和外部空气温度。
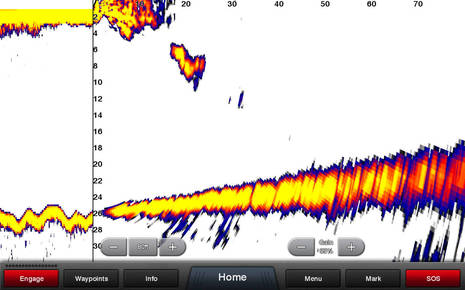
LiveVü Forward模式提供了更加实时视频图像化的水下画面,显示船下鱼群游动方向,甚至钓手也可以随时监视其抛出的鱼饵漂浮状态。同时还可以测量目标的左右距离与深度。
以单一的声波更新整个画面并获得实时的水下活动声纳图像。你除了可以看到游动的鱼群是接近或远离本船,还可以看到小的饵料鱼和大鱼在水中游来游去,包括你的鱼饵状态。

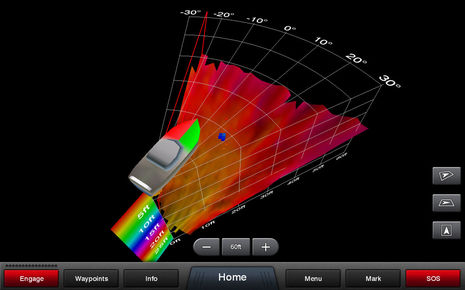
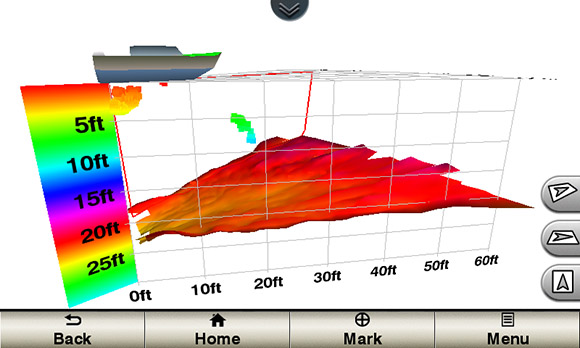
RealVü 3D Forward模式将船艏方向扫描的探测数据信号数字化,进而产生前方水下3D三维海底结构以及鱼群的图像,用户可以根据实际情况需要控制前方区域扫描速度获得最佳探测效果。其具有水平或垂直显示方式。
以每一个声波刷新一个3D阵列切割页面,大约1至4秒钟刷新全部3D阵列切割页面。它显示了在水下柱体朝向船艏方向上水下地形和鱼群。其声纳波束向前扫描,并在屏幕上显示的只是一次的扫描回波信号。
只要一个Panoptix前向声纳传感器探头,你就可以直观地看到你船前方水下的海底地形、水下结构和游动的鱼群,完全实时状态,即使船舶处于静止停泊状态也一样可以探测并获得两种令人惊叹的显示画面:LiveVü Forward 和 RealVü 3-D Forward。
Garmin Panoptix前向声纳传感器适用于Garmin旗下以下产品型号显示器单元:
· Garmin GPSmap 7400/7600系列
· Garmin GPSmap 8000/8500系列
· Garmin GPSmap 7x1/8x1/10x1系列
· Garmin echoMap 70s/70dv
同时Panoptix传感器还可以安装在Trolling Motor小型钓鱼艇拖推发动机上使用,十分适合Bass钓鱼艇安装使用。